全新机器人技术探索:运动控制器接口的深入研究与实践 (全新机器人技能大赛)

随着科技的飞速发展,机器人技术已成为当今社会的热门话题。
作为机器人技术的重要组成部分,运动控制器接口的研究与实践对于提升机器人的性能至关重要。
本文将深入探讨运动控制器接口的相关技术,并结合实践,分享在全新机器人技能大赛中的经验。
一、运动控制器接口概述
运动控制器接口是机器人技术与外部世界交互的关键环节。
它负责接收来自传感器、操作器和其他外部设备的指令,并根据这些指令控制机器人的运动。

运动控制器接口的主要功能包括:
1. 接收和处理外部指令:运动控制器接口能够接收来自上位机的指令,如路径规划、速度控制等,并对这些指令进行处理,以确保机器人按照预定要求执行动作。
2. 控制机器人运动:基于接收到的指令,运动控制器接口产生相应的控制信号,驱动机器人的各个关节、电机等执行部件,实现机器人的运动。
3. 实时反馈与调整:运动控制器接口能够实时获取机器人的状态信息,如位置、速度、加速度等,并根据这些信息对机器人的运动进行实时调整,以提高机器人的运动精度和稳定性。
二、运动控制器接口技术研究
1. 硬件设计:运动控制器接口的硬件设计是实现机器人运动控制的基础。设计时需考虑接口的类型、连接方式、数据传输速率等因素,以确保硬件能够满足实时、高效的运动控制需求。
2. 软件算法:软件算法是运动控制器接口的核心。常见的软件算法包括路径规划、速度控制、位置控制等。这些算法的实现直接影响到机器人的运动性能。
3. 传感器技术:传感器是运动控制器接口获取机器人状态信息的关键设备。随着传感器技术的不断发展,如惯性传感器、光学传感器等新型传感器的应用,为运动控制器接口提供了更丰富的信息来源,提高了机器人的运动精度和稳定性。
三、实践应用与经验分享
在全新机器人技能大赛中,我们团队对运动控制器接口进行了深入研究与实践。以下是我们在实践过程中的经验分享:
1. 跨学科团队合作:机器人技术涉及多个学科领域,如机械、电子、计算机等。在研究和实践中,我们强调跨学科团队合作,充分发挥各领域的优势,共同解决运动控制器接口面临的技术挑战。
2. 充分利用现有资源:在研究和实践中,我们充分利用现有资源,如开源硬件、软件库等,以提高研发效率。同时,我们还积极参与开源社区,与其他开发者交流经验,共同推动机器人技术的发展。
3. 注重实践与调试:在研究过程中,我们注重实践与调试,通过不断的实验和调整,优化运动控制器接口的性能。同时,我们还关注实际应用需求,确保运动控制器接口能够满足机器人的运动需求。
4. 不断创新与改进:在比赛中,我们鼓励团队成员不断创新与改进,尝试新的技术和方法,以提高机器人的性能。例如,我们尝试使用新型传感器来提高机器人的运动精度和稳定性;优化算法以提高机器人的运动效率等。
四、总结与展望
本文对运动控制器接口进行了深入研究与实践,并结合在全新机器人技能大赛中的经验进行了分享。
未来,随着科技的不断发展,运动控制器接口将面临更多挑战和机遇。
我们将继续深入研究相关技术,不断创新与改进,为机器人技术的发展做出贡献。
本文地址: https://yd.zdmlj.com/article/39edddb714aaf0b535ca.html


乘龙云数字化智慧系统

该站点未添加描述description...

该站点未添加描述description...

穿衣搭配网专为女性提供免费穿衣打扮方向,专业打扮和服饰搭配、美容知识等方面的精彩文章,365天DayDay更新,欢迎常来。如果你有穿衣打扮方面的疑问或者技巧希望和我们分享,请联系我们的微信号

天津恒沣栩翔专业生成销售钢纤维,高碳钢丝,低碳钢丝,粘排钢纤维,的钢纤维生产厂家,欢迎来电.022-65675397

咸阳黄页88网是免费发布信息网,欢迎您登录咸阳信息港、咸阳信息网,您可以在咸阳黄页88网浏览咸阳信息港和咸阳信息网最新最全的B2B信息,同时可以免费发布信息和刊登B2B广告,感谢您使用咸阳黄页88网免费发布信息平台。

替古人担忧网

广州礼上网来有限公司,地址是广州市白云区机场路,联系方式是,86-020-86337258

黄泽斌工作室是项目中工作伙伴团队代称。我们深信在“改革创新、开放合作”精神的指引下,能够凝聚集体智慧引领未来。感谢我们服务过的机构对我们的支持和培养!感谢前进道路上的每一位贵人相助!感谢我们的家人给予我们无尽的支持和爱!让我们砥砺前行,绽放生命的精彩!没有最好,只有更好!

【锐奇软件】提供国内领先的微信小程序开发工具,傻瓜式制作无需代码,拖拽可视化组件即可完成,拥有海量小程序行业模板,帮助千万商户一键生成微信小程序。

手游梦工厂站是一个专为手游爱好者打造的综合性游戏平台。我们提供丰富多样的手游资源,涵盖各种类型、风格和题材,满足不同玩家的需求和喜好。在这里,您可以轻松下载新、热门的手游,体验极致的游戏乐趣。同时,我们还提供游戏资讯、攻略、交流社区等一站式服务,让您与其他玩家互动、分享心得,共同探索手游的无限魅力。手游梦工厂站,圆您的手游梦想!

利华益集团股份有限公司

全方位解析变频器故障与解决方案一、引言变频器作为现代工业控制领域中的重要设备,广泛应用于电机驱动、自动化生产线等领域,随着变频器应用的普及,其故障问题也逐渐凸显出来,本文将全方位解析变频器故障及其解决方案,为工程师和技术人员提供有价值的参考信息,二、变频器的定义与作用变频器是一种利用电力电子技术,将固定频率的交流电源转换为可调频率的交...。
全方位解读编程技巧与案例实战一、引言随着科技的飞速发展,编程已经成为现代人必备的技能之一,无论是从事专业开发工作,还是为了满足日常生活中的需求,掌握编程技巧都显得尤为重要,本文将全方位解读编程技巧,并结合案例实战,帮助读者更好地理解和掌握编程知识,二、编程基础1.编程语言选择编程语言的种类繁多,如Python、Java、C,、Jav...。
信捷编码器在工业自动化中的应用一、引言随着工业自动化的飞速发展,编码器作为一种重要的传感器件,广泛应用于各类机械设备中,信捷编码器作为国内外知名品牌,以其高精度、高性能的特点,在工业自动化领域占据重要地位,本文将详细介绍信捷编码器在工业自动化中的应用及其位置,二、信捷编码器概述信捷编码器是一种测量设备,主要用于测量机械部件的旋转位置、...。

PLC与三色灯之间的连接与配置问题解析一、引言在现代工业自动化领域,可编程逻辑控制器,PLC,发挥着举足轻重的作用,PLC用于控制各种设备,包括三色灯等指示设备,本文将详细介绍PLC与三色灯之间的连接与配置问题,为工程师和技术人员提供实用的指导,二、PLC与三色灯概述1.PLC简介PLC,即可编程逻辑控制器,是一种专门为工业环境设计的...。

解密背后的法律风险与道德困境,以解密法术为例的探讨一、引言随着信息技术的飞速发展,解密行为在网络世界中愈发普遍,解密法术这一概念,虽带有神秘色彩,实则涉及到法律风险与道德困境,本文旨在探讨解密法术背后的法律风险与道德问题,并提醒公众对此保持警惕,共同维护网络安全与道德底线,二、解密法术概述解密法术,顾名思义,指的是通过一系列技术手段破...。

变频器常见故障及解决方案,变频器常见故障代码大全,一、引言变频器是现代工业领域中广泛应用于电机控制的重要设备,其高效、节能的特点受到广大工程师和技术人员的青睐,但在使用过程中,由于各种原因,变频器难免会出现各种故障,本文旨在介绍变频器常见的故障及其解决方案,帮助读者更好地理解和应对变频器故障问题,二、变频器概述变频器是一种调整电机转速...。
计算机编程中的200中断与定时子程序深入了解一、引言在计算机系统中,中断与定时子程序扮演着至关重要的角色,特别是在嵌入式系统、操作系统、实时控制系统等领域,对中断和定时子程序的理解与应用至关重要,本文将深入探讨计算机编程中的200中断与定时子程序,帮助读者更好地理解其概念、原理及应用,二、中断概述中断是计算机系统中一种重要的技术,用于...。

伺服电机单次定位原理详解,如何设置伺服电机单次运行长度,一、引言在现代工业和科技领域,伺服电机作为一种精密的控制执行元件,广泛应用于各种自动化设备中,伺服电机的定位精度和速度控制是其核心功能之一,本文将详细介绍伺服电机的单次定位原理,并探讨如何设置伺服电机的单次运行长度,二、伺服电机定位原理伺服电机定位是基于电机的转动来控制设备的位置...。
维修步骤详解——成为DIY维修小能手一、引言随着科技的飞速发展和生活水平的提高,家电、家居等设备和设施的维修已成为我们日常生活中不可或缺的一部分,掌握一些基本的维修技巧不仅能解决日常生活中的小问题,还能在紧急情况下应对突发状况,本文将为大家详细介绍维修的基本步骤和技巧,助你成为DIY维修小能手,二、维修准备在进行任何维修工作之前,首先...。

库卡机器人备份恢复的必要性及流程一、引言随着工业自动化水平的不断提高,机器人技术在生产领域的应用越来越广泛,库卡机器人作为其中的佼佼者,以其高效、稳定的性能赢得了广大用户的信赖,在实际应用中,由于各种原因,如系统故障、误操作等,可能会导致库卡机器人数据丢失或系统异常,因此,对库卡机器人进行备份恢复显得尤为重要,本文将从库卡机器人备份恢...。

实践操作环境的关键性不容漠视一、引言随着科技的极速开展,实践操作环境在咱们日常生存和上班中表演着越来越关键的角色,实践操作环境不只关乎技艺的造就,更与咱们的职业开展毫不相关,本文将讨论实践操作环境的含意及其在各个畛域中的关键性,剖析实践操作环境对集体和社会开展的影响,强调实践操作环境不容漠视的要素,二、实践操作环境的含意实践操作环境指...。
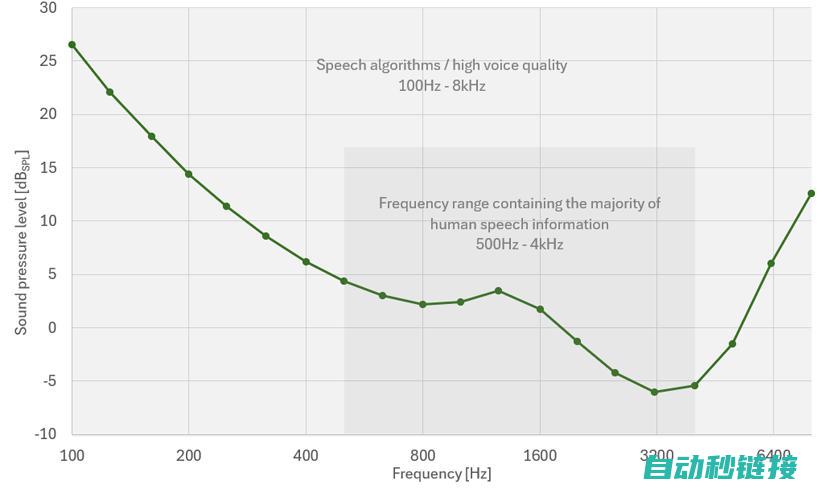
在英飞凌,咱们不时坚信出色的音频处置打算关于优化消费类设施的用户体验至关关键。咱们锲而不舍地努力于翻新,在被动降噪、语音透传、录音室录音、音频变焦和其余关系技术方面取得了清楚提高,对此咱们深感自豪。作为MEMS麦克风的上游供应商,英飞凌集中资源改善MEMS麦克风的音频品质,为TWS和耳罩式耳机、笔记本电脑、平板电脑、会议系统、智能手机、智能音箱、助听器甚至汽车等各种消费设施带来出色体验。

减一功能在PLC程序中的应用场景一、引言PLC,可编程逻辑控制器,作为一种重要的工业控制装置,广泛应用于各种生产流程和自动化系统中,减一功能作为PLC程序中的基本运算功能之一,在控制过程中发挥着重要作用,本文将详细介绍减一功能在PLC程序中的应用场景及其削减作用,二、PLC与减一功能概述PLC是一种基于数字计算机技术的工业控制装置,用...。

伺服移印机程序设置指南一、引言伺服移印机是一种高精度、高效率的印刷设备,广泛应用于电子、半导体、陶瓷、塑料等行业,它通过伺服控制系统精确控制印刷过程中的各项参数,实现高精度、高速度的印刷生产,本文将详细介绍伺服移印机的程序设置,帮助用户更好地了解和使用该设备,二、伺服移印机简介伺服移印机是一种采用伺服电机驱动,结合精密机械结构和智能控...。

安川变频器维修全面解析一、引言安川变频器作为一种高品质的变频器产品,广泛应用于工业领域,随着设备长时间运行,可能会出现各种故障,本文将对安川变频器维修进行全面解析,以帮助用户更好地了解和解决使用过程中遇到的问题,二、安川变频器概述安川变频器是一种电力调整设备,主要用于控制电机的转速,其通过改变电源频率来实现对电机转速的精确控制,具有节...。

从现状到未来趋势的全面解读,软硬件的发展趋势一、引言随着科技的飞速发展,软硬件技术不断进步,改变了我们的生活方式和工作模式,从现状到未来,软硬件的发展趋势将如何演变,本文将从多个角度全面解读软硬件的现状及未来趋势,二、硬件发展趋势1.云计算与边缘计算,硬件的云端化与智能化云计算技术的普及使得硬件资源得以共享,提高了资源利用率,随着大数...。
深度解析ABB机器人伺服总线的功能与特点=======================引言,随着工业自动化的快速发展,机器人技术已成为现代制造业的核心组成部分,ABB机器人作为其中的佼佼者,其伺服总线的功能和特点引起了广泛关注,伺服总线在ABB机器人中扮演着重要的角色,为机器人的精准控制和高效运作提供了强大的支持,本文将深度解析AB...。
